International Space Station (ISS) Servicing Robot Capstone Project
Lamia Farah, Daniel Fisher, Samantha Glassner, William Spencer, and Erica Traini
Project Description
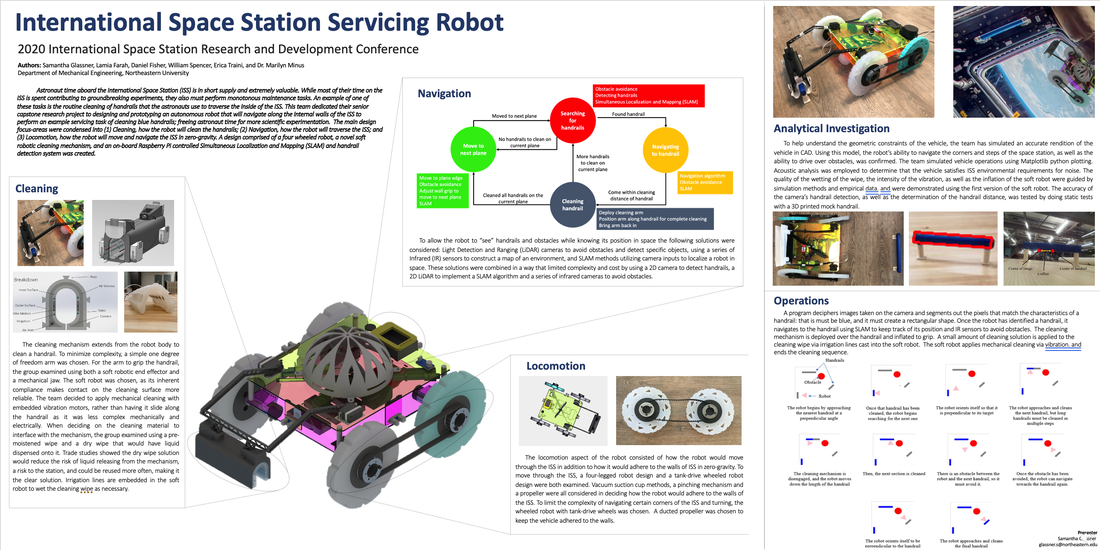
Astronaut time aboard the International Space Station (ISS) is in short supply and extremely valuable. While most of their time on the space station is spent contributing to groundbreaking experiments, they also must perform monotonous maintenance tasks. One example of these tasks is the routine cleaning of handrails that the astronauts use to traverse the zero-gravity environment of the ISS. This team has dedicated their capstone research project to designing and prototyping an autonomous robot that will drive along the walls of the ISS, avoiding obstacles, and navigating the station to perform an example servicing task of cleaning blue handrails; freeing astronaut time for more scientific experimentation. The main design focus-areas were condensed into (1) locomotion, how the robot will move and navigate the ISS in zero-gravity; (2) navigation, how the robot will traverse the ISS; and (3) cleaning mechanism, how it will clean the handrails. A design comprised of a four soft wheeled robot, a soft robotic cleaning mechanism, and an on-board Raspberry Pi controlled Simultaneous Localization and Mapping (SLAM) and handrail detection system was created.
International Space Station R&D Conference Poster
Our team submitted an abstract about our project and got accepted into the 2020 International Space Station Research and Development Conference! Below, you can view the poster presented on September 23, 2020 and download the PowerPoint version which includes an audio description.
| 2020_iss_rd_iss_servicing_robot_poster_compressed.pptx |
Capstone Final Presentation
Below is a video of the final 20 minute presentation our team gave for our capstone project.
