SOFT STEWART PLATFORM FOR ROBOTIC IN-SPACE ASSEMBLY APPLICATIONS
MASTERS THESIS
Link to Full Thesis: https://repository.library.northeastern.edu/files/neu:m046qg79j/fulltext.pdf
Thesis Description
My mechatronics thesis project is to develop a Soft Stewart Platform (SSP) robot that can have precise 6 Degrees of Freedom (DOF) position control. The SSP will be comprised of six Soft Linear Actuators (SLAs) with precision length control. A benefit of a SSP versus the conventional hard Stewart platform is the ability to store the robot in a compact state that is shorter than half the full actuator length, the limit for conventional electric linear actuators. Additionally, SSP could be used as a soft end effector for a long reach manipulator to allow it to precisely interact with fragile materials such as Kapton used for sunshields. Finally, multiple SSPs could be stacked to form a mobile robot that can maneuver around structures carefully. These possible applications for SSP robots are shown in the figures below.

Stewart platform (IPJR) as an end effector for a long reach manipulator (TALISMAN). [Erik E. Komendera et al. 2017]
|
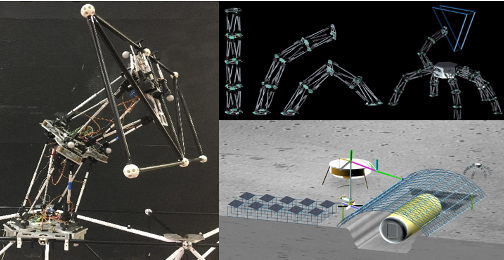
Possible applications for stacking Stewart platforms. [Erik E. Komendera et al. 2017]
|
Soft Linear Actuator (SLA) Development
|
The SLA is a pneumatic linear actuator with precise length controllability and a small stored length. I have found research on some soft linear actuators but they are often just used to extend and retract from a beginning to a final distance but with low controllability of their length throughout the movement. My SLA concept, shown in Figure 2, involves an inner inflatable tube that can be inflated from an air source to extend the actuator. To control actuator length there will be a soft rack on the sides of the actuator that will interface with a pinion in the top platform of the SSP to control the extension and retraction of the SLA. When the SLA reaches its desired length it will be rigidizes by causing laminar jamming by pulling vacuum on layers of paper between the exterior of the inflation tube and the interior of another larger tube. This SLA design works for terrestrial applications, for in-space applications a similar design could be used but there would be an exterior inflation tube and the laminar jamming effect would be caused by inflating both the inner and outer tubes and squeezing the section in-between them.
|
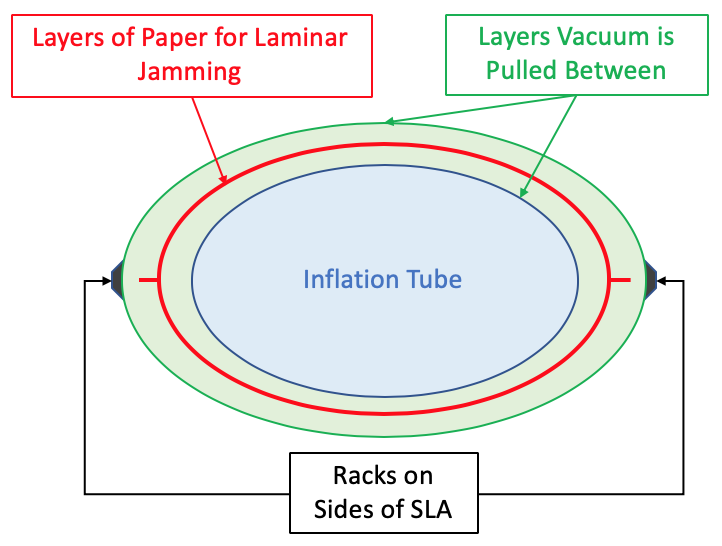
Figure 2: Soft linear Actuator (SLA) Interior Structure Concept
|
One end of the SLA would have the pneumatic tubes to control inflation of the inner tube and vacuum on the outer layer. The other side of the SLA would be able to be coiled for storage. This allows the SLA to have a high full extension to full retraction ratio, shown in Figure 3.
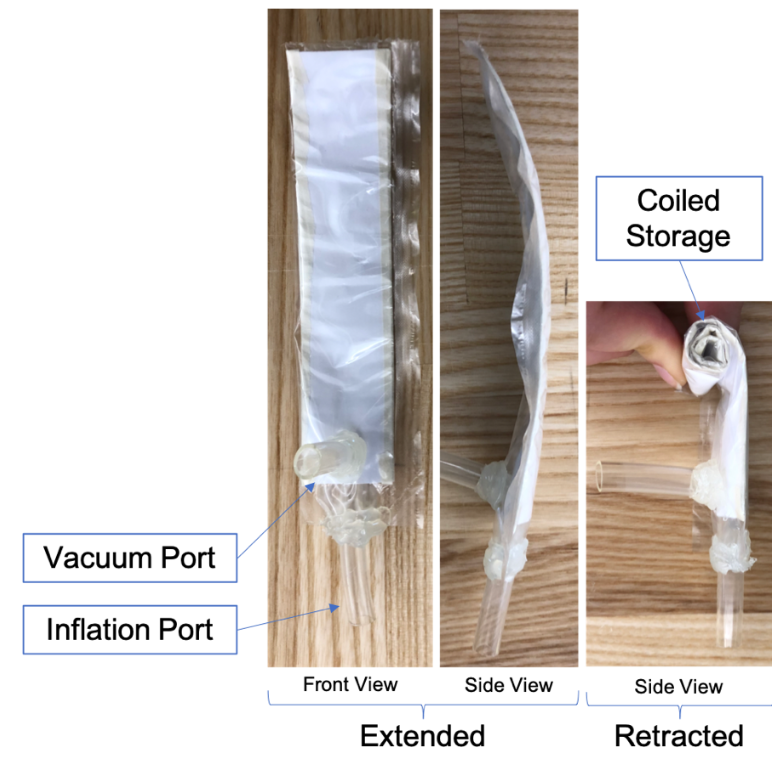
Figure 3: Soft linear Actuator (SLA) Prototyping
Soft Stewart Platform (SSP) Design
Six SLAs can be used to form a SSP. The top platform of the SSP would house the system for SLA length control and coiling of the excess actuator for storage, while the bottom platform would house the pneumatic actuator and vacuum control, shown in Figure 4.
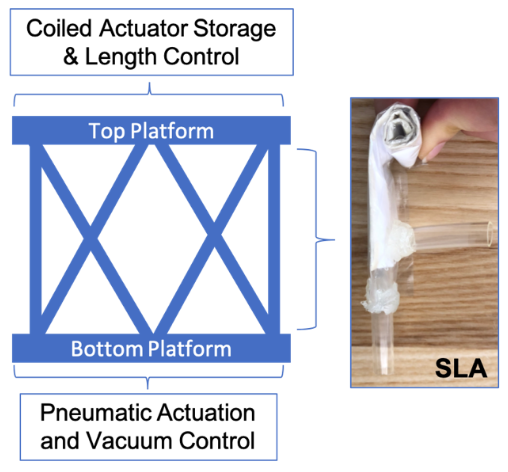
Figure 4: Soft Stewart Platform (SSP) Section Breakdown
The system in the top platform would control the SLA length by having two pinions (one on either side of the SLA) on a motor that can rotate and interface with the racks on the sides of the SLA to control the extension and retraction of the SLA. Rollers will be used in between the pinions to compress the actuator layers and create a seal for the end of the SLA. Then the excess actuator will be coiled inside the platform to maximize storage space.
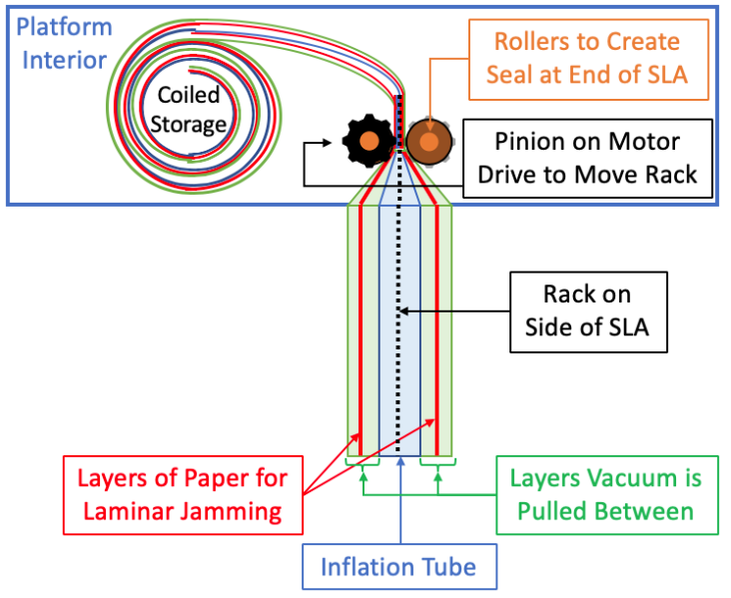
Figure 5: Soft Linear Actuator (SLA) Coiled Storage and Precision Length Control in Soft Stewart Platform (SSP) Top Platform
The bottom plate of the SSP will house the pneumatic control system. Six solenoid valves will be used, one for each SLA, to control when each individual SLA’s inflation tube is connected to the lab air supply for extension. Once the SSP gets into its desired position the vacuum pump connected to all the vacuum ports of the six SLAs will be turned on to rigidize the SSP position. This system will be controlled by an Arduino Mega with an XBee attached to allow for wireless control.
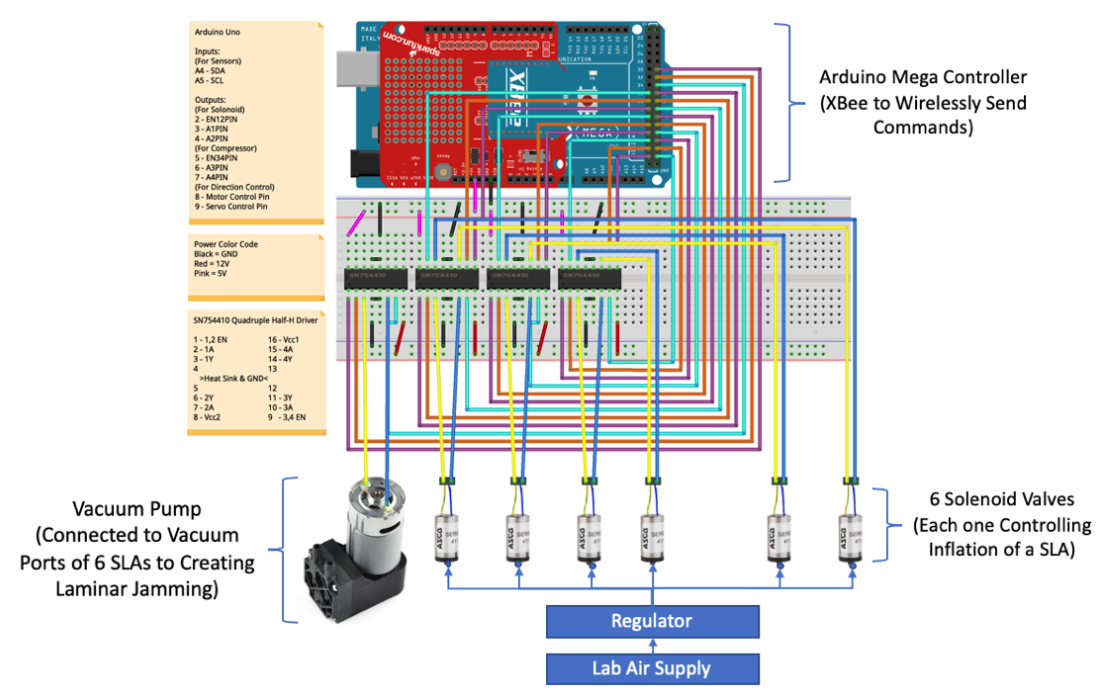
Figure 6: Soft Stewart Platform (SSP) Pneumatic Electronic Control Diagram
